


So, let's start with parts. Below is a diagram of the coolest part, the circuit board I designed and then had a machine cut out of a copper-plated board (previous post has tons of pics). Other pic is a circuit diagram of this complete project (note that the circuit board and arduino have unused connections, so there's still room to add). You might recognize the circuit board from the face of the bot; it plugs right into the arduino microcontroller (also on the bot). Using a circuit board makes it easier to connect accessories in a much more reliable and compact way than a bunch of loose wires.


Parts include:
- a bunch of foam core for frame.
- a bunch of hot glue for frame.
- an arduino Uno R3 microcontroller.
- a custom circuit board with H-Bridge chip and other stuff.
- H-Bridge chip (controls drive motor).
- LED x6 (six), color of your choice.
- momentary pushbuttons x2 (two).
- knob potentiometer.
- photo resistor.
- 180° servo motor.
- geared DC motor with wheel.
- light, thin RC airplane wheels x2 (two).
- Sharp "GP2Y0A21YK0F" Infrared Distance Sensor (~1m range).
- power source (in this case, USB battery pack).


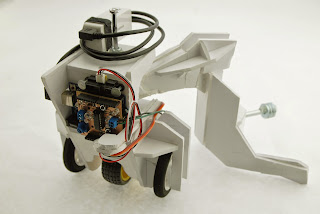
The mechanical configuration here is a bit quirky. A single front wheel drive system where a head unit pulls a sort of trailer. The head pivots above the wide drive wheel, the thin outside wheels are only for balance and rotate freely. A servo motor is located at the pivot point and provides precise angle control for the head. The trailer provides stability while the head rotates and scans the area.
The bot can scan 180° in front of itself. The servo motor turns the head (with IR distance sensor) in 10° increments and the distance of each increment is stored to an array (table). The head then rotates in the direction of the longest distance and then the drive wheel kicks in to start traveling toward the opening.
At this phase, the bot drives about a second before straightening out and stopping to re-assess the situation. This repeats as long as the battery allows. In testing, this works to get the bot through a tight passage and then turn around, exit and continue toward open space. A sort of error control averages adjacent scans and helps the bot choose a wider opening, which helps avoid corners and narrow openings. This also helps it tolerate errant readings. Below is a time-lapse image of a test.

This process is really slow at the moment. I can speed up the rate of scanning a bit, although the frame gets a little unstable, and the arduino needs a bit of time between scans for the power supply to stabilize. I'll keep testing to shave that down. Another way I can really speed things up is to add a couple more distance sensors to scan additional directions for each head angle... By splitting the 180° into 3, the head servo only needs to move 1/3 as many times. The arduino Uno R3 has enough pins to add these... all I have to do is mount them precisely and write some code.
And now for some code discussion. The program for this bot starts by addressing all of the ports for connecting the electronic components. It initializes some variables that will be used, such as the array (table) that stores the distance of each scan. The program also includes several functions, or blocks of code that are referenced sort of like a playlist.
The loop, or the playlist, is very short in this case; it "plays" functions to check all the buttons and see if they're pressed, then another runs through the possible actions for the pressed buttons. Next — if the previous button presses have allowed it — scanning commences and that leads to the choosing, turning, and driving in the chosen direction. Then, the loop repeats. again and again, until the batteries run out (or it finds a swimming pool).
Note: One thing computers are good at is checking many things quickly, so it's no big deal that this programs does things like a full button checklist every time through the loop; that happens in the blink of an eye.

Before we get to the actual code (and the end of this post) I would like to thank you for reading along. I encourage you to feel free to ask questions via the comments. I plan to refine this documentation over time and to even design an improved frame that can be 3D printed! Talk to you then [smiley face]!
The loop, or the playlist, is very short in this case; it "plays" functions to check all the buttons and see if they're pressed, then another runs through the possible actions for the pressed buttons. Next — if the previous button presses have allowed it — scanning commences and that leads to the choosing, turning, and driving in the chosen direction. Then, the loop repeats. again and again, until the batteries run out (or it finds a swimming pool).
Note: One thing computers are good at is checking many things quickly, so it's no big deal that this programs does things like a full button checklist every time through the loop; that happens in the blink of an eye.


Before we get to the actual code (and the end of this post) I would like to thank you for reading along. I encourage you to feel free to ask questions via the comments. I plan to refine this documentation over time and to even design an improved frame that can be 3D printed! Talk to you then [smiley face]!
Code Below:____________________________________________________
// this sketch is for a custom PCB: i/o must be matched
//=======================LIBRARIES============================//============================================================//============================================================#include <Servo.h>//============================================================
//=======================VARIABLES============================//============================================================//============================================================// unused digital pins: 0, 1.// unused analog pins: A3, A4.// analog pin A5 used in setup for servo control output.
// inputsconst int button1 = 7; // on-board, button closest to digital pinsconst int button2 = 4; // on-board closest to analog pinsconst int button3 = 2; // on-board closest to analog pinsconst int button4 = 5; // on-board closest to analog pinsint buttonRead1 = 111;int buttonRead2 = 111;int buttonRead3 = 111;int buttonRead4 = 111;const int pot1 = A0; // on-board potint potRead1 = 111;const int distanceSensor1 = A1; // Sharp "GP2Y0A21YK0F"int delaySensor = 110; // millis to allow voltage stabilization after dist readint distanceReads1[19] = {0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 111};const int lightSensor1 = A2;int lightRead1 = 111;
// indicatorsconst int light1 = 10; // LED by USB jack; PWM-equipped pin allows brightness controlconst int light2 = 3; // LED by D0; PWM-equipped pin allows brightness controlbool lightOn1 = false;bool lightOn2 = false;bool lightState1 = LOW; // for blinking light1
// actuators - servo1Servo servo1; // create servo object to control a servoint servoPosition1 = 90; // position of servo motorint scanIncrement = 10; // degrees to change between scan samplesint delayServo = 100; // millis to allow 10-degree servo travel
// actuators - motor1const int motorEnable1 = 11; // PWM-equipped (speed control)const int motorClockwise1 = 12;const int motorCounterClockwise1 = 13;int motorSpeed1 = 100; // percentage speed for matching 1&2int motorDirection1 = 111;
// actuators - motor2const int motorEnable2 = 9; // PWM-equipped (speed control)const int motorClockwise2 = 6;const int motorCounterClockwise2 = 8;int motorSpeed2 = 100; // percentage speed for matching 1&2int motorDirection2 = 111;
// administrative variablesint distanceScores1[17] = {0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0};bool movementOn = false; // turns on physical operations (movement&scanning)bool printCycle = false; // if things print to serial monitorint delayPrint = 1000; // delay to print to serial monitorint delayBlink = 111; // for blinking lightint delayMovementShort = 400; // interval to drive short (when making big turns)int delayMovement = 1000; // interval to drive mediumint delayMovementLong = 4000; // interval to drive long (when going straight)unsigned long currentMillis = 0;unsigned long previousMillis = 0;unsigned long currentMillisPrint = 0;unsigned long previousMillisPrint = 0;unsigned long currentMillisBlink = 0;unsigned long previousMillisBlink = 0;unsigned long currentMillisMovement = 0;unsigned long previousMillisMovement = 0;//============================================================
//=========================SETUP==============================//============================================================//============================================================void setup() { Serial.begin(9600); // Input pins: pinMode(button1, INPUT_PULLUP); pinMode(button2, INPUT_PULLUP); pinMode(button3, INPUT_PULLUP); pinMode(button4, INPUT_PULLUP); pinMode(pot1, INPUT); pinMode(distanceSensor1, INPUT); pinMode(lightSensor1, INPUT); // Output pins: pinMode(light1, OUTPUT); pinMode(light2, OUTPUT); // H-Bridge motor1 pins: pinMode(motorEnable1, OUTPUT); digitalWrite(motorEnable1, LOW); // turn off just in case pinMode(motorClockwise1, OUTPUT); digitalWrite(motorClockwise1, LOW); // turn off just in case pinMode(motorCounterClockwise1, OUTPUT); digitalWrite(motorCounterClockwise1, LOW); // turn off just in case // H-Bridge motor2 pins: pinMode(motorEnable2, OUTPUT); digitalWrite(motorEnable2, LOW); // turn off just in case pinMode(motorClockwise2, OUTPUT); digitalWrite(motorClockwise2, LOW); // turn off just in case pinMode(motorCounterClockwise2, OUTPUT); digitalWrite(motorCounterClockwise2, LOW); // turn off just in case // servo motor servo1.attach(A5); // attach servo on pin A5 to servo1 object. servo1.write(servoPosition1); // center the servo (twitches on startup, so may as well set it). // conversions motorSpeed1 = map (motorSpeed1, 0, 100, 0, 255); motorSpeed2 = map (motorSpeed2, 0, 100, 0, 255); // set time variables currentMillis = millis(); previousMillis = millis(); currentMillisPrint = millis(); previousMillisPrint = millis(); currentMillisBlink = millis(); previousMillisBlink = millis(); currentMillisMovement = millis(); previousMillisMovement = millis();} // close setup.//============================================================
//=========================LOOP===============================//============================================================//============================================================void loop() { readInputs(); // read button and sensor inputs and writes to serial. safety(); // stop movement if bumper switches engaged. buttons(); // act on the button pushes. lights(); // turn on lights according to buttons() and ambient light (lightRead1)
if (movementOn == true) { scanning(); // sweep the servo and record values, drive in the most open direction for a short period. } // close "if(operating...)"} // close loop.//============================================================
//=======================FUNCTIONS============================//============================================================//============================================================//...................readInputs function......................//============================================================void readInputs() { printCycle = false; // read inputs buttonRead1 = digitalRead(button1); buttonRead2 = digitalRead(button2); buttonRead3 = digitalRead(button3); buttonRead4 = digitalRead(button4); potRead1 = analogRead(pot1); delay(2); // delay for analog read stability distanceReads1[0] = analogRead(distanceSensor1); delay(delaySensor); // delay for analog read stability lightRead1 = analogRead(lightSensor1); delay(2); // delay for analog read stability // write results currentMillisPrint = millis(); if (currentMillisPrint > (previousMillisPrint + delayPrint)) { printCycle = false; Serial.println(""); Serial.println("new cycle: "); Serial.print("( servoPosition1 = "); Serial.print(servoPosition1); Serial.print(" )( buttonRead1 = "); Serial.print(buttonRead1); Serial.print(" )( buttonRead2 = "); Serial.print(buttonRead2); Serial.print(" )( buttonRead3 = "); Serial.print(buttonRead3); Serial.print(" )( buttonRead4 = "); Serial.print(buttonRead4); Serial.println(" )"); Serial.print("( potRead1 = "); Serial.print(potRead1); Serial.print(" )( distanceReads1[0] = "); Serial.print(distanceReads1[0]); Serial.print(" )( lightRead1 = "); Serial.print(lightRead1); Serial.print(" )( motorSpeed1 = "); Serial.print(map (motorSpeed1, 0, 255, 0, 100)); Serial.print(" )( motorSpeed2 = "); Serial.print(map (motorSpeed2, 0, 255, 0, 100)); Serial.println(" )"); previousMillisPrint = currentMillisPrint; } // close "if(currentMillisPrint...)" else { printCycle = false; } // close "else"} // close function "readInputs"//~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
//....................safety function.........................//============================================================void safety() { if (buttonRead3 == 0 || buttonRead4 == 0) { motorDirection1 = 0; motorDirection2 = 0; Serial.println("safety bumper activated"); } // close "if(buttonRead3...)"} // close function "safety()"//~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
//....................buttons function........................//============================================================void buttons() { if (buttonRead1 == 0 && buttonRead2 == 0) { lightOn1 = !lightOn1; lightOn2 = !lightOn2; Serial.print("toggle lightOn1 = "); Serial.println(lightOn1); Serial.print("toggle lightOn2 = "); Serial.println(lightOn2); } // close first "if" else { if (buttonRead1 == 0 && buttonRead2 == 1) { movementOn = false; Serial.print("movementOn = "); Serial.println(movementOn); } // close second "if" else { if (buttonRead1 == 1 && buttonRead2 == 0) { movementOn = true; Serial.print("movementOn = "); Serial.println(movementOn); } // close "if (buttonRead1...)" } // close second "else" } // close first "else"} // close function "buttons"//~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
//.....................lights function........................//============================================================void lights() { // light1 if (lightOn1 == true) { currentMillisBlink = millis(); if (currentMillisBlink - previousMillisBlink > potRead1) { previousMillisBlink = currentMillisBlink; // if the LED is off turn it on and vice-versa: if (lightState1 == LOW) { lightState1 = HIGH; } // close "if(ledState...)" else { lightState1 = LOW; } // close "else" // set the LED with the ledState of the variable: digitalWrite(light1, lightState1 ); } // close "if(currentMillisBlink...)" else { digitalWrite(light1, HIGH); } // close "else" } // close "if(lightOn1...)" // light2 if (lightOn2 == true) { analogWrite(light2, (255 - (lightRead1 / 4)) ); // use "lightRead1" to turn on brighter in the dark } // close first "if" else { digitalWrite(light2, LOW); } // close "else"} // close function "lights"//~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
//....................motors function.......................//============================================================void motors() { // motor1 if (motorDirection1 == 1) { if (printCycle = true) { Serial.println("motorDirection1 = 1 @"); Serial.print(motorSpeed1); Serial.println("%"); } // close "if" analogWrite(motorEnable1, motorSpeed1); digitalWrite(motorClockwise1, HIGH); digitalWrite(motorCounterClockwise1, LOW); } // close first "if" else { if (motorDirection1 == 2) { if (printCycle = true) { Serial.println("motorDirection1 = 2 @"); Serial.print(motorSpeed1); Serial.println("%"); } // close "if" analogWrite(motorEnable1, motorSpeed1); digitalWrite(motorClockwise1, LOW); digitalWrite(motorCounterClockwise1, HIGH); } // close second "if" else { if (motorDirection1 == 0) { if (printCycle = true) { Serial.println("motor1 STOPPING"); } // close "if" analogWrite(motorEnable1, LOW); digitalWrite(motorClockwise1, LOW); digitalWrite(motorCounterClockwise1, LOW); } // close "if (stopButtonState)..." } //close second "else" } //close first "else" // motor2 if (motorDirection2 == 1) { if (printCycle = true) { Serial.println("motorDirection2 = 1 @"); Serial.print(motorSpeed2); Serial.println("%"); } // close "if" analogWrite(motorEnable2, motorSpeed2); digitalWrite(motorClockwise2, HIGH); digitalWrite(motorCounterClockwise2, LOW); } // close first "if" else { if (motorDirection2 == 2) { if (printCycle = true) { Serial.print("motorDirection2 = 2 @ "); Serial.print(motorSpeed2); Serial.println("%"); } // close "if" analogWrite(motorEnable2, motorSpeed2); digitalWrite(motorClockwise2, LOW); digitalWrite(motorCounterClockwise2, HIGH); } // close second "if" else { if (motorDirection2 == 0) { if (printCycle = true) { Serial.println("motor2 STOPPING"); } // close "if" analogWrite(motorEnable2, LOW); digitalWrite(motorClockwise2, LOW); digitalWrite(motorCounterClockwise2, LOW); } // close "if (stopButtonState)..." } //close second "else" } //close first "else"} // close function "movement"//~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
//....................scanning function.......................//============================================================void scanning() { int i = 0; int lowestValue = 4096; // for remembering low (every group should be lower) int lowestValueI = 0; // for remembering which direction was low Serial.println("new scan: "); servoPosition1 = 0; delay(80); servo1.write(servoPosition1); delay( delayServo * 5 ); // wait for servo to move // this if goes until the end of the function...
// scanning/panning here for (i = 0; i < 19 ; i++) { if (movementOn == true) { servo1.write(servoPosition1); delay(delayServo); // wait for servo to move delay(delaySensor); // wait for voltage stabilization before sensor reading distanceReads1[i] = analogRead(distanceSensor1); delay(delaySensor); // delay for analog read stability Serial.print("( distanceReads1[] @ "); Serial.print(i * scanIncrement, DEC); Serial.print(" degrees = "); Serial.print(distanceReads1[i]); Serial.println(" )"); buttonRead1 = digitalRead(button1); buttonRead2 = digitalRead(button2); buttons(); servoPosition1 += scanIncrement; } // close "if(movementOn...)" delay(delayServo); } // close "for(servoPosition1...)"
// scoring for (i = 0; i < 17; i++) { distanceScores1[i] = ( distanceReads1[i] + distanceReads1[i + 1] + distanceReads1[i + 2] ); } // close "for(i=0...)"
// analyze the scores for (i = 0; i < 17; i++) { int value = distanceScores1[i]; if (lowestValue > value) { lowestValue = value; // record [possible] new lowest value lowestValueI = i; // record [possible] new lowest direction lowestValueI = lowestValueI++; // add one to set as the middle of the scored trio } // close "if(lowestValue...)" } // close "for(i...)"
// report the chosen score Serial.print("lowestValueI (aka Chosen Direction) = "); Serial.println((lowestValueI) * 10); // go and straighten out if (movementOn == true) { servo1.write((lowestValueI) * 10 );
// wait longer for servo if it's turning all the way to the 0-side if (lowestValueI < 40) { delay( delayServo * 6 ); } // close "if(lowestValueI...)" else { if (lowestValueI < 110) { delay( delayServo * 4 ); } // close "if(lowestValueI...)" else { delay(delayServo * 2); } // close else 2 } // close else 1
// for larger turns, drive longer before straightening wheel if (lowestValueI < 40 || lowestValueI > 140) { motorDirection2 = 2; motors(); delay(delayMovementShort); servo1.write(90); delay( delayServo * 2 ); motorDirection2 = 0; motors(); delay( delayServo * 3 ); } // close "if(lowestVaslueI...)" else { if (lowestValueI < 60 || lowestValueI > 100) { motorDirection2 = 2; motors(); delay(delayMovement); servo1.write(90); motors(); delay( delayServo * 3 ); delay(delayMovement); motorDirection2 = 0; motors(); delay( delayServo * 2 ); } // close "if(lowestVaslueI...)" else { motorDirection2 = 2; motors(); delay(delayMovement); servo1.write(90); motors(); delay(delayServo * 2); motors(); delay(delayMovementLong); motorDirection2 = 0; motors(); } // close else 2 } // close else 1 } // close "if(movementOn...)"} // close function "scanning"//~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
//=======================LIBRARIES============================//============================================================//============================================================#include <Servo.h>//============================================================
//=======================VARIABLES============================//============================================================//============================================================// unused digital pins: 0, 1.// unused analog pins: A3, A4.// analog pin A5 used in setup for servo control output.
// inputsconst int button1 = 7; // on-board, button closest to digital pinsconst int button2 = 4; // on-board closest to analog pinsconst int button3 = 2; // on-board closest to analog pinsconst int button4 = 5; // on-board closest to analog pinsint buttonRead1 = 111;int buttonRead2 = 111;int buttonRead3 = 111;int buttonRead4 = 111;const int pot1 = A0; // on-board potint potRead1 = 111;const int distanceSensor1 = A1; // Sharp "GP2Y0A21YK0F"int delaySensor = 110; // millis to allow voltage stabilization after dist readint distanceReads1[19] = {0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 111};const int lightSensor1 = A2;int lightRead1 = 111;
// indicatorsconst int light1 = 10; // LED by USB jack; PWM-equipped pin allows brightness controlconst int light2 = 3; // LED by D0; PWM-equipped pin allows brightness controlbool lightOn1 = false;bool lightOn2 = false;bool lightState1 = LOW; // for blinking light1
// actuators - servo1Servo servo1; // create servo object to control a servoint servoPosition1 = 90; // position of servo motorint scanIncrement = 10; // degrees to change between scan samplesint delayServo = 100; // millis to allow 10-degree servo travel
// actuators - motor1const int motorEnable1 = 11; // PWM-equipped (speed control)const int motorClockwise1 = 12;const int motorCounterClockwise1 = 13;int motorSpeed1 = 100; // percentage speed for matching 1&2int motorDirection1 = 111;
// actuators - motor2const int motorEnable2 = 9; // PWM-equipped (speed control)const int motorClockwise2 = 6;const int motorCounterClockwise2 = 8;int motorSpeed2 = 100; // percentage speed for matching 1&2int motorDirection2 = 111;
// administrative variablesint distanceScores1[17] = {0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0};bool movementOn = false; // turns on physical operations (movement&scanning)bool printCycle = false; // if things print to serial monitorint delayPrint = 1000; // delay to print to serial monitorint delayBlink = 111; // for blinking lightint delayMovementShort = 400; // interval to drive short (when making big turns)int delayMovement = 1000; // interval to drive mediumint delayMovementLong = 4000; // interval to drive long (when going straight)unsigned long currentMillis = 0;unsigned long previousMillis = 0;unsigned long currentMillisPrint = 0;unsigned long previousMillisPrint = 0;unsigned long currentMillisBlink = 0;unsigned long previousMillisBlink = 0;unsigned long currentMillisMovement = 0;unsigned long previousMillisMovement = 0;//============================================================
//=========================SETUP==============================//============================================================//============================================================void setup() { Serial.begin(9600); // Input pins: pinMode(button1, INPUT_PULLUP); pinMode(button2, INPUT_PULLUP); pinMode(button3, INPUT_PULLUP); pinMode(button4, INPUT_PULLUP); pinMode(pot1, INPUT); pinMode(distanceSensor1, INPUT); pinMode(lightSensor1, INPUT); // Output pins: pinMode(light1, OUTPUT); pinMode(light2, OUTPUT); // H-Bridge motor1 pins: pinMode(motorEnable1, OUTPUT); digitalWrite(motorEnable1, LOW); // turn off just in case pinMode(motorClockwise1, OUTPUT); digitalWrite(motorClockwise1, LOW); // turn off just in case pinMode(motorCounterClockwise1, OUTPUT); digitalWrite(motorCounterClockwise1, LOW); // turn off just in case // H-Bridge motor2 pins: pinMode(motorEnable2, OUTPUT); digitalWrite(motorEnable2, LOW); // turn off just in case pinMode(motorClockwise2, OUTPUT); digitalWrite(motorClockwise2, LOW); // turn off just in case pinMode(motorCounterClockwise2, OUTPUT); digitalWrite(motorCounterClockwise2, LOW); // turn off just in case // servo motor servo1.attach(A5); // attach servo on pin A5 to servo1 object. servo1.write(servoPosition1); // center the servo (twitches on startup, so may as well set it). // conversions motorSpeed1 = map (motorSpeed1, 0, 100, 0, 255); motorSpeed2 = map (motorSpeed2, 0, 100, 0, 255); // set time variables currentMillis = millis(); previousMillis = millis(); currentMillisPrint = millis(); previousMillisPrint = millis(); currentMillisBlink = millis(); previousMillisBlink = millis(); currentMillisMovement = millis(); previousMillisMovement = millis();} // close setup.//============================================================
//=========================LOOP===============================//============================================================//============================================================void loop() { readInputs(); // read button and sensor inputs and writes to serial. safety(); // stop movement if bumper switches engaged. buttons(); // act on the button pushes. lights(); // turn on lights according to buttons() and ambient light (lightRead1)
if (movementOn == true) { scanning(); // sweep the servo and record values, drive in the most open direction for a short period. } // close "if(operating...)"} // close loop.//============================================================
//=======================FUNCTIONS============================//============================================================//============================================================//...................readInputs function......................//============================================================void readInputs() { printCycle = false; // read inputs buttonRead1 = digitalRead(button1); buttonRead2 = digitalRead(button2); buttonRead3 = digitalRead(button3); buttonRead4 = digitalRead(button4); potRead1 = analogRead(pot1); delay(2); // delay for analog read stability distanceReads1[0] = analogRead(distanceSensor1); delay(delaySensor); // delay for analog read stability lightRead1 = analogRead(lightSensor1); delay(2); // delay for analog read stability // write results currentMillisPrint = millis(); if (currentMillisPrint > (previousMillisPrint + delayPrint)) { printCycle = false; Serial.println(""); Serial.println("new cycle: "); Serial.print("( servoPosition1 = "); Serial.print(servoPosition1); Serial.print(" )( buttonRead1 = "); Serial.print(buttonRead1); Serial.print(" )( buttonRead2 = "); Serial.print(buttonRead2); Serial.print(" )( buttonRead3 = "); Serial.print(buttonRead3); Serial.print(" )( buttonRead4 = "); Serial.print(buttonRead4); Serial.println(" )"); Serial.print("( potRead1 = "); Serial.print(potRead1); Serial.print(" )( distanceReads1[0] = "); Serial.print(distanceReads1[0]); Serial.print(" )( lightRead1 = "); Serial.print(lightRead1); Serial.print(" )( motorSpeed1 = "); Serial.print(map (motorSpeed1, 0, 255, 0, 100)); Serial.print(" )( motorSpeed2 = "); Serial.print(map (motorSpeed2, 0, 255, 0, 100)); Serial.println(" )"); previousMillisPrint = currentMillisPrint; } // close "if(currentMillisPrint...)" else { printCycle = false; } // close "else"} // close function "readInputs"//~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
//....................safety function.........................//============================================================void safety() { if (buttonRead3 == 0 || buttonRead4 == 0) { motorDirection1 = 0; motorDirection2 = 0; Serial.println("safety bumper activated"); } // close "if(buttonRead3...)"} // close function "safety()"//~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
//....................buttons function........................//============================================================void buttons() { if (buttonRead1 == 0 && buttonRead2 == 0) { lightOn1 = !lightOn1; lightOn2 = !lightOn2; Serial.print("toggle lightOn1 = "); Serial.println(lightOn1); Serial.print("toggle lightOn2 = "); Serial.println(lightOn2); } // close first "if" else { if (buttonRead1 == 0 && buttonRead2 == 1) { movementOn = false; Serial.print("movementOn = "); Serial.println(movementOn); } // close second "if" else { if (buttonRead1 == 1 && buttonRead2 == 0) { movementOn = true; Serial.print("movementOn = "); Serial.println(movementOn); } // close "if (buttonRead1...)" } // close second "else" } // close first "else"} // close function "buttons"//~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
//.....................lights function........................//============================================================void lights() { // light1 if (lightOn1 == true) { currentMillisBlink = millis(); if (currentMillisBlink - previousMillisBlink > potRead1) { previousMillisBlink = currentMillisBlink; // if the LED is off turn it on and vice-versa: if (lightState1 == LOW) { lightState1 = HIGH; } // close "if(ledState...)" else { lightState1 = LOW; } // close "else" // set the LED with the ledState of the variable: digitalWrite(light1, lightState1 ); } // close "if(currentMillisBlink...)" else { digitalWrite(light1, HIGH); } // close "else" } // close "if(lightOn1...)" // light2 if (lightOn2 == true) { analogWrite(light2, (255 - (lightRead1 / 4)) ); // use "lightRead1" to turn on brighter in the dark } // close first "if" else { digitalWrite(light2, LOW); } // close "else"} // close function "lights"//~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
//....................motors function.......................//============================================================void motors() { // motor1 if (motorDirection1 == 1) { if (printCycle = true) { Serial.println("motorDirection1 = 1 @"); Serial.print(motorSpeed1); Serial.println("%"); } // close "if" analogWrite(motorEnable1, motorSpeed1); digitalWrite(motorClockwise1, HIGH); digitalWrite(motorCounterClockwise1, LOW); } // close first "if" else { if (motorDirection1 == 2) { if (printCycle = true) { Serial.println("motorDirection1 = 2 @"); Serial.print(motorSpeed1); Serial.println("%"); } // close "if" analogWrite(motorEnable1, motorSpeed1); digitalWrite(motorClockwise1, LOW); digitalWrite(motorCounterClockwise1, HIGH); } // close second "if" else { if (motorDirection1 == 0) { if (printCycle = true) { Serial.println("motor1 STOPPING"); } // close "if" analogWrite(motorEnable1, LOW); digitalWrite(motorClockwise1, LOW); digitalWrite(motorCounterClockwise1, LOW); } // close "if (stopButtonState)..." } //close second "else" } //close first "else" // motor2 if (motorDirection2 == 1) { if (printCycle = true) { Serial.println("motorDirection2 = 1 @"); Serial.print(motorSpeed2); Serial.println("%"); } // close "if" analogWrite(motorEnable2, motorSpeed2); digitalWrite(motorClockwise2, HIGH); digitalWrite(motorCounterClockwise2, LOW); } // close first "if" else { if (motorDirection2 == 2) { if (printCycle = true) { Serial.print("motorDirection2 = 2 @ "); Serial.print(motorSpeed2); Serial.println("%"); } // close "if" analogWrite(motorEnable2, motorSpeed2); digitalWrite(motorClockwise2, LOW); digitalWrite(motorCounterClockwise2, HIGH); } // close second "if" else { if (motorDirection2 == 0) { if (printCycle = true) { Serial.println("motor2 STOPPING"); } // close "if" analogWrite(motorEnable2, LOW); digitalWrite(motorClockwise2, LOW); digitalWrite(motorCounterClockwise2, LOW); } // close "if (stopButtonState)..." } //close second "else" } //close first "else"} // close function "movement"//~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~
//....................scanning function.......................//============================================================void scanning() { int i = 0; int lowestValue = 4096; // for remembering low (every group should be lower) int lowestValueI = 0; // for remembering which direction was low Serial.println("new scan: "); servoPosition1 = 0; delay(80); servo1.write(servoPosition1); delay( delayServo * 5 ); // wait for servo to move // this if goes until the end of the function...
// scanning/panning here for (i = 0; i < 19 ; i++) { if (movementOn == true) { servo1.write(servoPosition1); delay(delayServo); // wait for servo to move delay(delaySensor); // wait for voltage stabilization before sensor reading distanceReads1[i] = analogRead(distanceSensor1); delay(delaySensor); // delay for analog read stability Serial.print("( distanceReads1[] @ "); Serial.print(i * scanIncrement, DEC); Serial.print(" degrees = "); Serial.print(distanceReads1[i]); Serial.println(" )"); buttonRead1 = digitalRead(button1); buttonRead2 = digitalRead(button2); buttons(); servoPosition1 += scanIncrement; } // close "if(movementOn...)" delay(delayServo); } // close "for(servoPosition1...)"
// scoring for (i = 0; i < 17; i++) { distanceScores1[i] = ( distanceReads1[i] + distanceReads1[i + 1] + distanceReads1[i + 2] ); } // close "for(i=0...)"
// analyze the scores for (i = 0; i < 17; i++) { int value = distanceScores1[i]; if (lowestValue > value) { lowestValue = value; // record [possible] new lowest value lowestValueI = i; // record [possible] new lowest direction lowestValueI = lowestValueI++; // add one to set as the middle of the scored trio } // close "if(lowestValue...)" } // close "for(i...)"
// report the chosen score Serial.print("lowestValueI (aka Chosen Direction) = "); Serial.println((lowestValueI) * 10); // go and straighten out if (movementOn == true) { servo1.write((lowestValueI) * 10 );
// wait longer for servo if it's turning all the way to the 0-side if (lowestValueI < 40) { delay( delayServo * 6 ); } // close "if(lowestValueI...)" else { if (lowestValueI < 110) { delay( delayServo * 4 ); } // close "if(lowestValueI...)" else { delay(delayServo * 2); } // close else 2 } // close else 1
// for larger turns, drive longer before straightening wheel if (lowestValueI < 40 || lowestValueI > 140) { motorDirection2 = 2; motors(); delay(delayMovementShort); servo1.write(90); delay( delayServo * 2 ); motorDirection2 = 0; motors(); delay( delayServo * 3 ); } // close "if(lowestVaslueI...)" else { if (lowestValueI < 60 || lowestValueI > 100) { motorDirection2 = 2; motors(); delay(delayMovement); servo1.write(90); motors(); delay( delayServo * 3 ); delay(delayMovement); motorDirection2 = 0; motors(); delay( delayServo * 2 ); } // close "if(lowestVaslueI...)" else { motorDirection2 = 2; motors(); delay(delayMovement); servo1.write(90); motors(); delay(delayServo * 2); motors(); delay(delayMovementLong); motorDirection2 = 0; motors(); } // close else 2 } // close else 1 } // close "if(movementOn...)"} // close function "scanning"//~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~~